




About Us
Executive Editor:Publishing house "Academy of Natural History"
Editorial Board:
Asgarov S. (Azerbaijan), Alakbarov M. (Azerbaijan), Aliev Z. (Azerbaijan), Babayev N. (Uzbekistan), Chiladze G. (Georgia), Datskovsky I. (Israel), Garbuz I. (Moldova), Gleizer S. (Germany), Ershina A. (Kazakhstan), Kobzev D. (Switzerland), Kohl O. (Germany), Ktshanyan M. (Armenia), Lande D. (Ukraine), Ledvanov M. (Russia), Makats V. (Ukraine), Miletic L. (Serbia), Moskovkin V. (Ukraine), Murzagaliyeva A. (Kazakhstan), Novikov A. (Ukraine), Rahimov R. (Uzbekistan), Romanchuk A. (Ukraine), Shamshiev B. (Kyrgyzstan), Usheva M. (Bulgaria), Vasileva M. (Bulgar).



Engineering
 PDF
PDFIn the process of continuous reheating furnaces’ operation multitude of factors have disturbing influence upon process of stocks’ heating. Heating conditions remain constant during small time periods. Now relay controllers and controllers applying traditional linear laws of control are used for control of stocks’ heating in reheating furnaces. These controllers not always can manage their control tasks. Therefore using of robust controllers is of big importance as one of their main features is capacity of normal operation under conditions of uncertainty and action of disturbances [1].
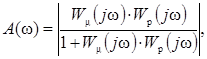
The control object is continuous furnace of rolling mill 2000 of Volgograd metallurgical centre “Red October”. Let’s determine robust tuning coefficients of its integral controllers’ first heating zone. At experimental determination of complex frequency response (CFR) of objects estimation of every its vector usually is realized with error of  . Only its absolute magnitude is known for this error. In other words end of vector being estimated can be situated within circle of radius of with center in end of vector obtained from experiment. In that case at estimation of system robustness it is enough to operate with absolute magnitude of CFR Φ(jω) which changing is determined directly by variations of set CFR of open loop Wр.с.(jω) [2]:
. Only its absolute magnitude is known for this error. In other words end of vector being estimated can be situated within circle of radius of with center in end of vector obtained from experiment. In that case at estimation of system robustness it is enough to operate with absolute magnitude of CFR Φ(jω) which changing is determined directly by variations of set CFR of open loop Wр.с.(jω) [2]:
 (1)
(1)
where
 (2)
(2)
where Vmax(ω) – sensitivity function, characterizing quantitative changing of system properties, caused by changing of its separate elements’ properties,
VP(ω) и VQ(ω) – sensitivity functions of variations for real ΔP(ω) and imaginary ΔQ(ω) components of CFR respectively [2]:
 (3)
(3)
Wр(jω) – CFR of controller.
Varied amplitude frequency response (AFR) of closed loop is added from sum of AFR and its variation respectively [2]:
 (4)
(4)
 (5)
(5)
 (6)
(6)
After determination of maximum for varied AFR of closed loop and varied value of oscillation frequency index Mvar let’s find for this case new robust value of I-controller transfer constant kt according to known technique [2, 3].
Let’s carry out calculations by above mentioned formulas in MathCAD package. Let’s assume that CFR of object accepted in calculations can have maximum error = 0,1 on all frequencies. Earlier [3] CFR of first heating zone Wμ(jω) has been obtained, value of oscillation frequency index M = 1,8 has been set and maximum permissible value of transfer constant on this index has been determined kt = 0,218.
In figure 1 varied AFR of closed loop (solid-line curve) and nonvaried AFR of loop (dashed curve) are plotted. Value of frequency index M = 1,8 calculated earlier is represented by dash-dotted straight line. As we see, resonance peak rose to value of 2,32, e.g. it is 0,52 higher than required one. Hence it is necessary to carry out calculation of sensitivity function repeatedly with value M = 1,8 - 0,52 = 1,28. Let’s determine value of constant kt by plotting CFR of closed loop and M-circle anew at one plane. Robust value of constant is equal to 0,161.
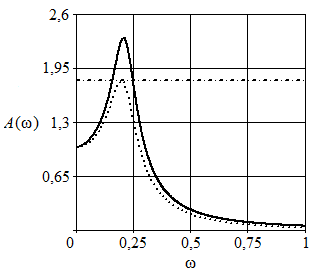
Figure 1 – Varied and nonvaried AFR of closed loop
Let’s repeat testing of varied oscillation index value. Excess of new value over previous one is 0,27. Hence it is necessary to carry out calculation of sensitivity function repeatedly with value M = 1,28 - 0,27 = 1,01. New robust value of I-controller transfer constant is equal to 0,106. Let’s repeat testing of varied oscillation index value once more (fig. 2). Excess of new value over previous one is 0,1, it is possible to consider it insignificant. Obtained adjustment of controller is considered as final.
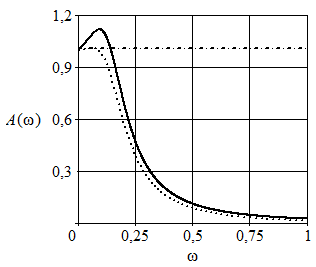
Figure 2 – Corrected AFR of closed loop
Let’s repeat procedures described above for controllers of second heating and soaking zones. Robust values of tuning coefficients are equal to 0,118 и 0,112 respectively. Controllers of reheating furnace zones possessing of robustness property secure guaranteed heating of stocks under conditions of charging which is heterogeneous by initial thermal state and steel grades and when taking into account heat engineering parameters of furnace changing in time.
2. Rotach, V. Y. Automatic control theory: a textbook for high schools / V. Y. Rotach. – М. : MPEI Publishing house, 2008. – 396 p.
3. Serdobintsev, Y. P. Stability factor estimation of heating control system in a continuous furnace / Y. P. Serdobintsev, M. P. Kukhtik // International Journal of Applied and Fundamental Research. – 2015. – № 2. – URL: http://www.science-sd.com/461-24941
Serdobintsev Y.P., Kukhtik M.P. ADJUSTMENT OF ROBUST CONTROLLER FOR CONTINUOUS REHEATING FURNACE. International Journal Of Applied And Fundamental Research. – 2017. – № 3 –
URL: www.science-sd.com/471-25378 (10.07.2026).